
Inhaltsverzeichnis
Oberfläche GNSS-Auswertung:

Menü
 |
Datei
Protokolle drucken
| NRW GPS Richtlinien Anlage 4 | Sachsen-Anhalt Sapos Protokoll |
 |  |
Messdatenprotokoll auswerten
Messdatenprotokolle auswerten. Alle GNSS-Messungen werden mit den aktuellen Einstellungen in das Zielsystem überführt.
Synchronisation mit Messdatenprotokoll
GPS-Auswertung mit Dokument synchronisieren. Die in der Oberfläche durchgeführten Änderungen werden mit den Dokumenten synchronisiert.
Bearbeiten
 |
| Gemittelte Koordinaten exportieren (Lage und Höhe) oder Gemittelte Koordinaten exportieren (Lage) |
|---|
 |
| Gemessene Koordinaten exportieren (Lage und Höhe) oder Gemessene Koordinaten exportieren (Lage) |
|---|
 |
| Gemittelte Koordinaten ins LTK exportieren |
|---|
 |
| TAROT-online Verfahrensdatei erstellen… |
|---|
 |
Siehe auch Auswertung Prüfmessung Rover mit Tarot
Hilfe
 | Hier gelangen Sie direkt zur Beschreibung der GNSS Auswertung |
Symbolleiste
| Symbol | Funktion |
|---|---|
 | Messdatenprotokolle auswerten. Alle GNSS-Messungen werden mit den aktuellen Einstellungen in das Zielsystem überführt. |
 | Protokolle drucken. Die Protokolle nach Anlage 4 der GNSS-Richtlinien NRW werden ausgedruckt. |
 | Punkt in Grafik anzeigen. Der Punkt wird in der Grafik zentriert und die Grafik wird in den Vordergrund gebracht. |
Der verebneten Koordinaten (Lage und Höhe oder nur Lage) werden durch Klick auf die Icons in ein KAVDI-Berechnungsdokument abgespeichert und stehen dann dem weiteren Berechnungsansätzen als Ausgangskoordinaten zur Verfügung.  In der Koordinateneingabe werden nicht nur die aus der GNSS-Auswertung gemittelten Koordinaten gespeichert, sondern auch die Einzelbeobachtungen. Diese finden dann in einer eventuell durchzuführenden Ausgleichung Verwendung. In der Koordinateneingabe werden nicht nur die aus der GNSS-Auswertung gemittelten Koordinaten gespeichert, sondern auch die Einzelbeobachtungen. Diese finden dann in einer eventuell durchzuführenden Ausgleichung Verwendung. |
|
 | GPS-Auswertung mit Dokument synchronisieren. Die in der Oberfläche durchgeführten Änderungen werden mit den Dokumenten synchronisiert. |
 | Online- Hilfeseite |
Navigator
Übersicht : Allgemein

Zugriffseinstellungen KAVDI-Datenbank:
- Eingabefeld: Punktnummerierungsbezirk NBZ (Min). Wird zur Suche der identischen Punkte in der KAVDI-Datenbank bei einer Transformation verwendet.
- Eingabefeld: Punktnummerierungsbezirk TK25 (Min). Wird zur Suche der identischen Punkte in der KAVDI-Datenbank bei einer Transformation verwendet.
- Auswahlfeld: Datenbankzugriff. Wird zur Suche der identischen Punkte in der KAVDI-Datenbank bei einer Transformation verwendet.
- Intern (Projektspeicher)
- Extern (Festpunktspeicher)
- Intern / Extern
Einstellungen:
- Auswahlfeld: Gewichtung der Lagekoordinaten. Gewichtungsansätze der Mittelungen. Es stehen zur Zeit folgende Gewichtungsansätze zur Verfügung:
- Keine
- 1 / (KQ_2D^2)
- Auswahlfeld: Messdaten: gemessene ellipsoidische Höhe bezieht sich auf :
- Boden
Aus dem GNSS Gerät werden geozentrische Koordinaten und die Antennenhöhe ausgegeben. Ist die geozentrische Koordinaten schon um die Antennenhöhe reduziert, würde man hier „gemessene ellipsoidische Höhe bezieht sich auf: Boden“ einstellen. ( In KAVDI darf dann die Antennenhöhe nicht nochmal abgezogen werden)
- Antenne
Werden die geozentrischen Koordinaten aus dem GNSS, bezogen auf die Antenne, ausgegeben, muss in KAVDI die Antennenhöhe berücksichtigt werden.
Die Auswahlmöglichkeit steht nur zur Verfügung, wenn auch Höhen gemessen wurden.
Übersicht: Zielsystem Lage
Parameter Zielsystem (Lage)
- Lagestatus
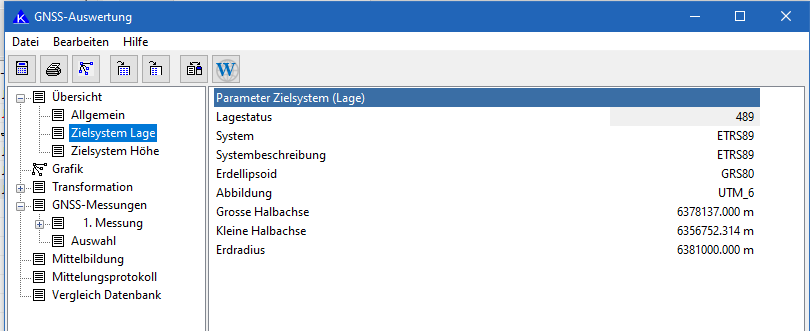
Mit dem Auswahlfeld wird das Zielsystem festgelegt. Es werden alle dem Projekt bekannten Lagestatus bereitgestellt. Ist das Zielsystem kompatibel zum WGS84, dann kann eine direkte Umrechnung der GNSS-Koordinaten in das Zielsystem durchgeführt werden.
Die Informationen aus der Lagestatuskonfiguration des ausgewählten Lagestatus werden hier dargestellt. Hierzu gehören: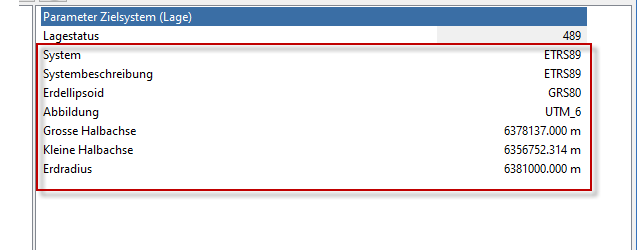
Ansonsten muss ein Ellipsoidübergang berechnet werden.


Transformation für die Berechnung der Lagekoordinaten
Falls der Ziellagestatus zum WGS84 nicht kompatibel ist, ist ein Ellipsoidsprung erforderlich. Jetzt müssen die gemessenen Koordinaten über eine 7-Parameter-Transformation in das Zielsystem überführt werden.

Hierzu stehen dann drei Methoden zur Verfügung:
- Auswahlfeld: Transformationsparameter für Ellipsoidsprung
Die Transformationsparameter (7-Parameter) können aus Passpunkten berechnet werden oder vorgegeben werden:
- 7-Parameter aus AP bestimmt (Es werden mind. 3 Passpunkte in beiden LST benötigt.)
- 7-Parameter vorgegeben

- Auswahlfeld: Zusätzliche Transformation zur Einpassung in das Zielsystem
Sind die Transformationsparameter vorgegeben, stellt sich die Frage, ob diese Parameter genau oder nur grob abgeleitet sind. Falls die Parameter grob abgeleitet sind, ist nach dem Ellipsoidübergang und der Verebnung noch eine 4-Parameter-Transformation für die genaue Einpassung in das Zielsystem notwendig. Das Auswahlfeld stellt die beiden Möglichkeiten der zusätzlichen Transformation zur Verfügung:
- Nein
- 4-Parameter aus AP bestimmt
Dieses Auswahlfeld wird nur eingeblendet, wenn für den Ellipsoidsprung die Transformationsparameter vorgegeben werden.
- Auswahlfeld: Vordefinierte Transformationsparameter beziehen sich auf:
Die vordefinierten Transformationsparameter für den Ellipsoidsprung werden aus geozentrischen Koordinaten bestimmt. Die geozentrischen Koordinaten können sich auf den Ellipsoid oder den Boden beziehen. Hieraus ergibt sich auch ein Bezug auf den Transformationsparameter, der eingestellt werden muss, da man es an den Parametern nicht erkennen kann:
- Boden
- Ellipsoid
Dieses Auswahlfeld wird nur eingeblendet, wenn für den Ellipsoidsprung die Transformationsparameter vorgegeben sind und keine weitere Einpassung in das Zielsystem benötigt wird.
- Auswahlfeld: Restklaffenverteilung.
Realisiert sind:
- Keine
- 1/s
- 1/(s^2)
- 1/(s^3)
- 1/(s^4)
- 1/(s^5)
- 1/(s^1.5)
- Multiquadratisch
- Sektorenmethode (Overhoff)
Vorgegebene Transformationsparameter für Ellipsoidsprung
Je nach Transformationstyp lautet die Überschrift:
- Vorgegebene, genaue Transformationsparameter
- Vorgegebene, grob abgeleitete Transformationsparameter
- Verschiebung dX [m]
- Verschiebung dY [m]
- Verschiebung dZ [m]
- Rotation um X [“]
- Rotation um Y [“]
- Rotation um Z [“]
- Maßstab [ppm]
Die Informationen zu den Transformationsparametern, die über Passpunkte bestimmt wurden, stehen im Navigator unter „Transformation“ zur Verfügung.
Punkte insgesamt
Statistik:
- Anschlusspunkte (dienen als Anschlusspunkte)
- Kontrollpunkte
- Neupunkte / neu bestimmte Punkte
Übersicht: Zielsystem Höhe
Parameter Zielsystem (Höhe)

Hiermit wird der Höhenstatus festgelegt.
Mit dem Auswahlfeld wird das Zielsystem festgelegt. Nur wenn ein Höhenstatus angegeben ist, berechnet die GNSS-Auswertung auch Höhen. Es werden alle dem Projekt bekannten Höhenstatus bereitgestellt. Ist das Zielsystem auf den gleichen Ellipsoid (GRS80 - Einstellung: elepsoidische Höhen) bezogen, dann kann eine direkte Umrechnung der GPS-Höhen in das Zielsystem durchgeführt werden.
Ausnahme: Wenn die Auswertung aus dem jeweiligen GNSS-Gerät direkt Koordinaten und verebnete Höhen liefert, dann bleibt der Höhenstatus leer. Die KMD-Datei leitet die Koordinaten und Höhen dann direkt weiter ins Berechnungsdokument.

Ansonsten muss ein Ellipsoidübergang berechnet werden. Hier gibt es zwei Möglichkeiten:

- 7-Parameter-Transofrmation
Dazu benötigt man Höhenpasspunkte. Hierbei werden gemessene oder vorhandene Höhenpasspunkte, deren Höhen in diesem Zielsystem bekannt sind, für eine Transformation verwendet.
- Undulationsmodell

Um diese Einstellungen zu wählen, müssen die erforderlichen Modelle geladen werden. Weitere Informationen dazu im folgenden Link. GNSS-Auswertung mittels Undulationsmodelle

Weitere Infos zu verschiedene Höhenarten bzw. Ellipsoiden finden Sie im folgenden Link: http://www.bezreg-koeln.nrw.de/brk_internet/publikationen/abteilung07/pub_geobasis_normalhoehen.pdf
Grafik
grafische Anzeige der Punkte.
Über die Icons kann man sich die Restklaffen, Fehlerelipsen u.a. anzeigen lassen.

Transformation

Mit der GPS-Auswertung sollen die gemessenen Koordinaten in ein amtliches Lage- bzw. Höhenzielsystem umgerechnet werden.
Passpunkte Lage
Die Berechnung der Lagekoordinaten in das amtliche Bezugssystem ETRS89 ist direkt durch Umformungen möglich, da sich das Zielsystem auf einen „kompatiblen“ Erdellipsoid bezieht. Die Dimensionen des WGS84 und des GRS80 sind nahezu identisch. In der Übersicht der GNSS-Auswertung lässt sich durch die Wahl eines Lagestatus ein anderes Zielsystem einstellen:
Unterscheidet sich nun der Rotationsellipsoid des Zielsystems vom WGS84, muss ein Ellipsoidsprung berechnet werden, der über eine 7-Parameter-Transformation realisiert wird. Das ist der Fall, wenn als Zielsystem das amtliche Gebrauchssystem DHDN (Netz77) eingestellt wird.
Die GNSS-Auswertung bietet mehrere Möglichkeiten zur Berechnung oder Bereitstellung der 7-Parameter:
- Berechnung der 7-Parameter aus Passpunkten.
Die Koordinaten der Passpunkte können hierbei aus verschiedenen Quellen bezogen werden.
- vorgegebene, genaue 7-Parameter
In der Übersicht können die 7-Parameter vorgegeben werden.
- vorgegebene, grob abgeleitete 7-Parameter
In der Übersicht können die 7-Parameter vorgegeben werden. Da die Parameter nicht genau genug sind, ist nach dem Ellipsoidübergang und der Verebnung noch eine 4-Parameter-Transformation für die genaue Einpassung in das Zielsystem notwendig.
Falls eine Transformation gerechnet werden muß, können die Passpunkte und das Ergebnis im Navigator unter „Transformation→Passpunkte Lage“ angezeigt und modifiziert werden:

Im oberen Fenster werden die ermittelten Transformationsparameter und die maximale Restklaffe angezeigt. Im unteren Fenster werden die Passpunkte gelistet. Über die rechte Maustaste wird ein Kontextmenü geöffnet, das die folgenden Funktionen bereitstellt:
- Passpunkt aktivieren
Ein deaktivierter Passpunkt wird wieder aktiviert. Er nimmt an der Bestimmung der Transformationsparameter teil.
- Passpunkt deaktivieren
Ein aktivierter Passpunkt wird deaktiviert. Er nimmt an der Bestimmung der Transformationsparameter nicht mehr teil. Die Zeile wird durchgestrichen.
- Passpunkt hinzufügen
Ein neuer Passpunkt wird hinzugefügt. Eine leere Zeile wird der Liste angefügt. Jetzt müssen die Spalten AKZ (Arbeitskennzeichen), Quellsystem, Zielsystem und gegebenfalls die LST (Lagestatus) ausgefüllt werden.
- Passpunkt löschen
Ein Passpunkt wird aus der Liste entfernt und nimmt damit nicht mehr an der Bestimmung der Transformationsparameter teil.
- Passpunkte automatisch suchen
Mit dieser Funktion werden alle gemessenen Punkte, die auch im Zielsystem Koordinaten besitzen, als potentielle Passpunkte in die Liste aufgenommen.
Kontextmenü:

Bei vorgegebenen, grob abgeleiteten 7-Parametern werden nicht die geozentrischen Koordinaten, sondern die Koordinaten in der Abbildung inkl. Restklaffen gelistet. Da der Ellipsoidsprung nur mit grob abgeleiteten Parametern durchgeführt wurde, sind die Restklaffen nicht aussagekräftig.
Die Liste der Passpunkte beinhaltet folgende Spalten:
| Spalte | Beschreibung |
|---|---|
| AKZ | Arbeitskennzeichen |
| Quellsystem | Die Koordinaten der Passpunkte des Quellsystems können gemessen sein oder aus der KAVDI-Datenbank stammen. Über ein Auswahlfeld kann der Typ der Quelle eingestellt werden: - gemessen - Projektspeicher der KAVDI-Datenbank (intern) - Festpunktspeicher der KAVDI-Datenbank (extern) |
| LST | Lagestatus, wenn unter dem Quellsystem als Quelle die KAVDI-Datenbank gewählt wurde. |
| X/Y/Z | Geozentrische Koordinaten der Quellsystems |
| Zielsystem | Die Koordinaten der Passpunkte des Zielsystems müssen in der KAVDI-Datenbank bekannt sein. Über ein Auswahlfeld kann der Typ der Quelle eingestellt werden: - Projektspeicher der KAVDI-Datenbank (intern) - Festpunktspeicher der KAVDI-Datenbank (extern) |
| LST | Lagestatus des Zielsystems. |
| X/Y/Z | Geozentrische Koordinaten bezogen auf den Ellipsoid des Zielsystems |
| RKX/RKY/RKZ | Restklaffen |
Passpunkte Höhe
Die gemessenen GNSS-Höhen sind ellipsoidische Höhen im Bezug auf WGS84. Um Gebrauchshöhen (´z.B. NHN-Höhen HST 160) zu berechnen, gibt es zwei Strategien:
- Dreidimensionale Transformation
7-Parameter-Transformation anhand einnivellierter Stützpunkte
- Verwendung von Geoidmodellen
Mit der GNSS-Auswertung können die Gebrauchshöhen über die dreidimensionale Transformation berechnet werden. Es müssen hierbei mindestens drei Punkte mit Höhen im Quell- und Zielsystem bekannt sein. Mit diesen Punkten werden dann die notwendigen 7-Parameter berechnet. In der Übersicht der GNSS-Auswertung läßt sich durch die Angabe eines Höhenstatus das Zielsystem einstellen:

Das Ergebnis kann im Navigator unter „Transformation→Passpunkte Höhe“ angezeigt und modifiziert werden:

Analog wie bei den Passpunkten zur Lagebestimmung können diese auch über die Funktionen eines Kontextmenüs bearbeitet werden:
- Passpunkt aktivieren
Ein deaktivierter Passpunkt wird wieder aktiviert. Er nimmt an der Bestimmung der Transformationsparameter teil.
- Passpunkt deaktivieren
Ein aktivierter Passpunkt wird deaktiviert. Er nimmt an der Bestimmung der Transformationsparameter nicht mehr teil. Die Zeile wird durchgestrichen.
- Passpunkt hinzufügen
Ein neuer Passpunkt wird hinzugefügt. Eine leere Zeile wird der Liste angefügt. Jetzt müssen die Spalten AKZ (Arbeitskennzeichen), Quellsystem, Zielsystem und gegebenfalls die HST (Höhenstatus) bzw. LST (Lagestatus) ausgefüllt werden.
- Passpunkt löschen
Ein Passpunkt wird aus der Liste entfernt und nimmt damit nicht mehr an der Bestimmung der Transformationsparameter teil.
- Passpunkte automatisch suchen
Mit dieser Funktion werden alle gemessenen Punkte, die auch im Zielsystem Höhen besitzen, als potentielle Passpunkte in die Liste aufgenommen.
GNSS-Messungen
Messungen
Anzeige der GNSS-Messungen. Für jeden Ansatz wird im Navigator ein Unterpunkt bereitgestellt:

Die Messungen werden im Hauptfenster gelistet. Hier sind bereits die Koordinaten in das Zielsystem umgerechnet:

| Spalte | Beschreibung |
|---|---|
| AKZ | Arbeitskennzeichen |
| SK | Steuerkennzeichen |
| Rechts-Y | Umgerechnete Koordinate in der Abbildung des Zielsystems |
| Hoch-X | Umgerechnete Koordinate in der Abbildung des Zielsystems |
| KQ 2D | Koordinatenqualität. Dieser Wert kann auch zur Gewichtung der Koordinaten für die Mittelbildung verwendet werden. Er wird durch eine Fehlergrenze (GPS_MAX_KQ_2D) überwacht. Standardfehlergrenze ist 0.04 m. |
| (M,E) Y | Rechtswert: Abweichung zum Mittelwert |
| (M,E) X | Hochwert: Abweichung zum Mittelwert |
| (M,E) | Abweichung zum Mittelwert |
| AH | Antennenhöhe |
| E. Höhe | Ellipsoidische Höhe |
| (M,E) H | Höhe: Abweichung zum Mittelwert |
| SV | Anzahl der Satelliten |
| Pos | Anzahl der GNSS-Positionen |
| H-Dop | DOP für die horizontale Positionsbestimmung |
| V-Dop | DOP für die vertikale Positionsbestimmung |
| P-Dop | DOP für die 3D-Positionsbestimmung |
| T-Dop | DOP für die Zeitbestimmung |
| G-Dop | DOP für 3D und Zeit |
| RMS | Root Mean Square (Quadratischer Mittelwert) |
| EPO | Anzahl der Epochen |
| Datum | Datum (Start der Messung) |
| Zeit | Zeit (Start der Messung) |
| Datum | Datum (Ende der Messung) |
| Zeit | Zeit (Ende der Messung) |
| NB°’” | Nördliche Breite (WGS84) (Grad, Minuten,Sekunden) |
| OL°’” | Östliche Länge (WGS84) (Grad, Minuten,Sekunden) |
Über das Kontextmenü können folgende Funktionen aufgerufen werden:
| Menüpunkt | Funktion |
|---|---|
| Deaktivieren | GNSS-Messung wird deaktiviert und wird bei der weiteren Verarbeitung nicht mehr berücksichtigt. |
| Aktivieren | Eine deaktivierte GNSS-Messung wird wieder aktiviert. |
| Referenzstationen anzeigen | Die Referenzstationen werden angezeigt. |
| Referenzstationen ausblenden | Die Referenzstationen werden ausgeblendet. |
| AKZ … in Auswahl exportieren | Alle GNSS-Messungen auf diesen Punkt werden in die Auswahl exportiert. Somit stehen alle Messungen auf diesen Punkt übersichtlich zur Verfügung. |
| AKZ … markieren | Alle GNSS-Messungen auf diesen Punkt werden markiert. |
GNSS-Messungen: Auswahl
Ein mehrfach aufgemessener Punkt kann in die Auswahl exportiert werden. Die Koordinaten aller Einzelmessungen werden aufgelistet und in einer Grafik dargestellt. Durch Anklicken eines Punktes in der Grafik kann man eine Messung deaktivieren. In der Liste erscheint sie durchgestrichen. Dort kann sie über das Kontextmenü wieder aktiviert werden. Mit Hilfe der Auswahl hat man die Möglichkeit, Ausreißer einfach festzustellen und zu beseitigen:

Unter dem Eintrag GNSS-Messungen sind alle GNSS-Messungen gelistet, die in den Messdatenprotokollen gefunden wurden. Pro Messung werden Daten zum verwendeten Rover gespeichert. Hierzu gehören unter anderem Informationen zum Antennentyp, mit dem wiederum die Korrekturdaten ermittelt werden. Alle Messungen eines Punktes können in eine Auswahl zur besseren Übersicht exportiert werden. Der Eintrag “Auswahl” befindet sich ebenfalls unter den GNSS-Messungen.
Mittelbildung
Anzeige der gemittelten Koordinaten incl. Genauigkeit:

In dieser Liste wird jeder gemessene Punkt nur einmal aufgeführt. Falls die Koordinate bzw. Höhe aus Mehrfachmessungen enstanden ist, werden Mittelbildungsinformationen in entsprechenden Spalten notiert. Die grau markierten Spalten werden mit einer Fehlergrenze überwacht. Bei einer Überschreitung wird das Feld rot markiert. Auch in dieser Übersicht kann ein Punkt in die Auswahl exportiert werden, damit Ausreißer feststellt werden können.
| Spalte | Beschreibung |
|---|---|
| AKZ | Arbeitskennzeichen |
| SK | Steuerkennzeichen |
| Rechts-Y | Gemittelte Koordinate in der Abbildung des Zielsystems |
| Hoch-X | Gemittelte Koordinate in der Abbildung des Zielsystems |
| RK-Y | Restklaffe im Rechtswert |
| RK-X | Restklaffe im Hochwert |
| Max (M,E) | Maximale Abweichung zum Mittelwert |
| (G,K) | Größte Abweichungen zwischen den Messungen. Dieser Wert wird durch eine Fehlergrenze (GPS_MAX_GK) überwacht. Standardfehlergrenze ist 0.04 m. |
| Höhe | Gemittelte ellipsoidische Höhe |
| Max (M,E) H | Maximale Abweichung der Höhe zum Mittelwert |
| SY | Standardabweichung des Rechtswertes |
| SX | Standardabweichung des Hochwertes |
| MP | Standardabweichung der Punktlage |
| SH | Standardabweichung der Höhe |
Mittelbildungsprotokoll

Vergleich Datenbank
In dieser Darstellung werden alle Punkte aufgelistet, die bereits Koordinaten in der Abbildung des Zielsystem oder eine Höhe besitzen. Die aktuellen Differenzen werden angezeigt und gegen eine Fehlergrenze geprüft:

| Spalte | Beschreibung |
|---|---|
| AKZ | Arbeitskennzeichen |
| SK | Steuerkennzeichen |
| Ger. Rechts-Y | Gemittelte Koordinate in der Abbildung des Zielsystems |
| Ger. Hoch-X | Gemittelte Koordinate in der Abbildung des Zielsystems |
| DB Rechts-Y | Koordinate aus der KAVDI-Datenbank |
| DB Rechts-X | Koordinate aus der KAVDI-Datenbank |
| Diff. Y | Differenz Rechtswert |
| Diff. X | Differenz Hochwert |
| Diff. Lage | Lineare Lagedifferenz |
| Ger. Höhe | Gerechnete Höhe |
| DB Höhe | Höhe aus der KAVDI-Datenbank |
| Diff. Höhe | Höhendifferenz |
| Die Einstellungen der GNSS-Auswertung können individuell voreingestellt werden. Weitere Informationen dazu hier |
|---|